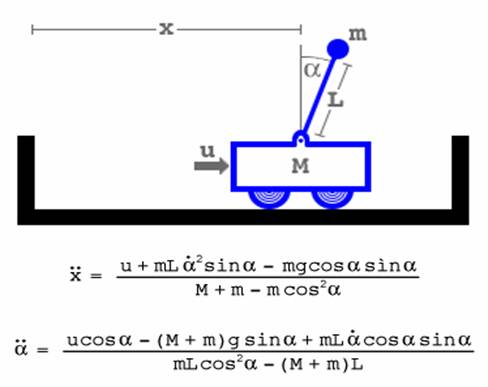
In the classic one-dimensional version of this problem, a pendulum of mass m, length L, and angle alpha from the vertical, hinged to a wheeled cart of mass M and position x, must be balanced upright by jostling the cart from side to side with force u. This system is highly dynamic and nonlinear. Its equations of motion are: |